6월에 군대 입대가 예정되어있어 휴학 중에 있습니다.
며칠 동안은 자유를 만끽했지만 이내 몸이 근질거리더라고요.
무슨 일을 벌일까 고민을 하다가,
저를 기계공학부로 오도록 만들어준 making을 오랜만에 해보기로 했습니다.
초, 중학교 때 취미 삼아서 과학상자, 아두이노 등을 많이 하면서
기계/로봇공학자가 되고 싶다라고 꿈을 꿔왔거든요.
이번에는 대학생 수준에 맞춰 무에서 유를 창조해보도록 했습니다.
제가 자주 찾아보는 “Mr Innovative” 이라는 채널입니다.
아두이노로 간단하면서 참신한 making을 올리는 채널인데, 그 중 3D 스캐너 영상이 눈에 들어왔습니다.
구조도 단순하고 직관적이며 3D 스캔 퀄리티도 나쁘지 않게 나오는걸 확인했습니다.
마침 집에 Nema 17 스텝 모터도 많고 거리 센서도 있는지라 만들어보기로 했습니다.
Pointcloud 데이터 처리 방법도 익힐 수 있는 좋은 기회라고 생각이 듭니다.
1. 부품 공수
1.1 집에서 공수
집에 굴러다니거나 기존에 만들었던 프로젝트의 하드웨어를 분해해서 얻은 부품들입니다.
- SMPS (LRS-100-12)
- NEMA 17 스텝 모터 3개
- Applied motion 4017-875 2개
- 42shdc3025-24b 1개
- A4988 모터 드라이버 2개
- L298n 모터 드라이버 2개
- LCD 16x2 I2C 모듈 1개
- 20mm 프로파일
1.2 싸이피아 (Scipia)
3D 프린터 부품 전문 온라인 쇼핑몰입니다.
- 5mm-8mm 커플링
- 8mm 리드 스크류 + 전용 리드 스크류 너트
- KP08 유니트 베어링
- SK8 샤프트 고정 클램프
1.3 미스미 (Misumi)
- 8mm 연마봉
- 2탭 세트칼라
1.4 청계천 세운상가
세운상가에 가서 직접 하드웨어 부품을 구입하였습니다.
- 고무발
- LMK8UU 사각플랜지형 리니어볼부쉬
- 프로파일 부속품
- M4, M5 스프링 너트
- ㄱ자 블라인드 브라켓
- Sharp GP2Y0A21YK0F IR 거리 센서
- HW-080 로터리 엔코더
- IEC 파워 케이블, 커넥터, 5W 퓨즈
1.5 디바이스마트 (Devicemart)
- 점퍼 케이블 F/F
- A4988 모터 드라이버(여분)
- 몰렉스 커넥터 2, 3, 4, 5, 6 pin, 클림프
- 수축 튜브
- SD card reader module
2. 하드웨어 제작 과정
2.1 하드웨어 모델링
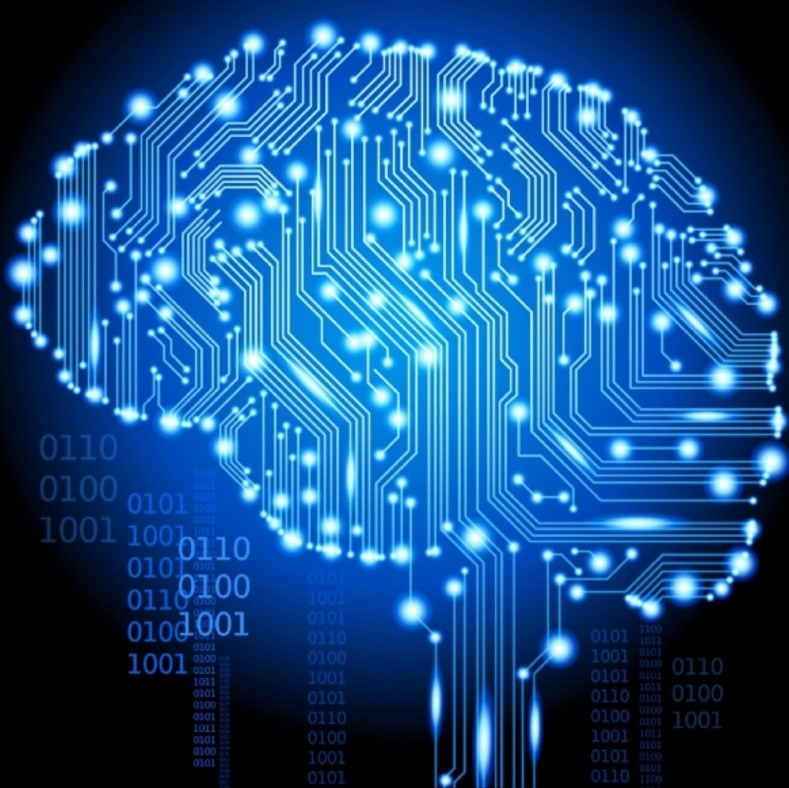
Solidworks를 이용하여 모델링하였습니다.
기본적인 골격은 20mm 프로파일로 구성하되, 3D 프린터와 레이저 커터로 부품을 추가로 가공하였습니다.
 3D scanner modeling plan
3D scanner modeling plan
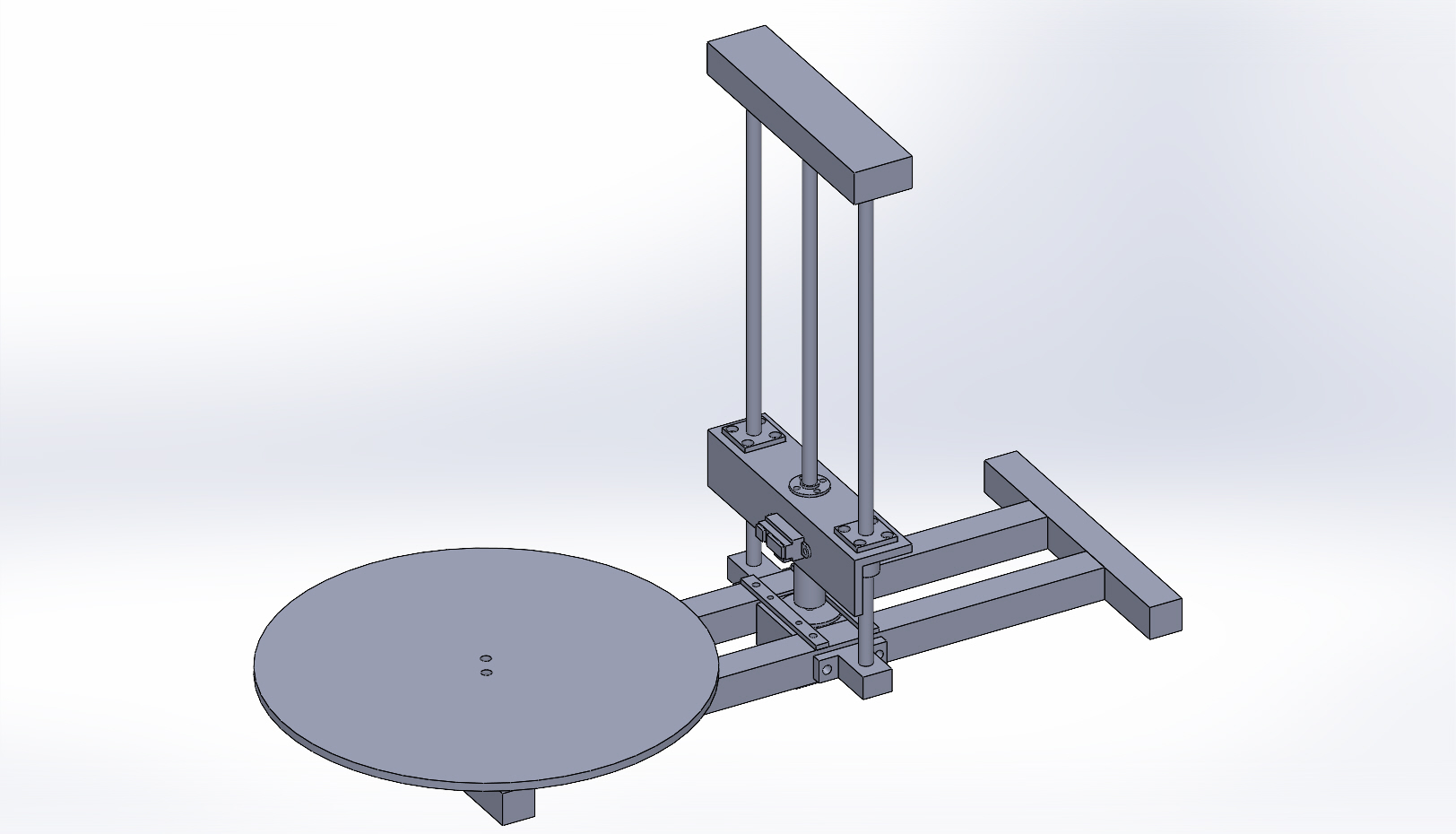
 3D scanner modeling floor plan
3D scanner modeling floor plan
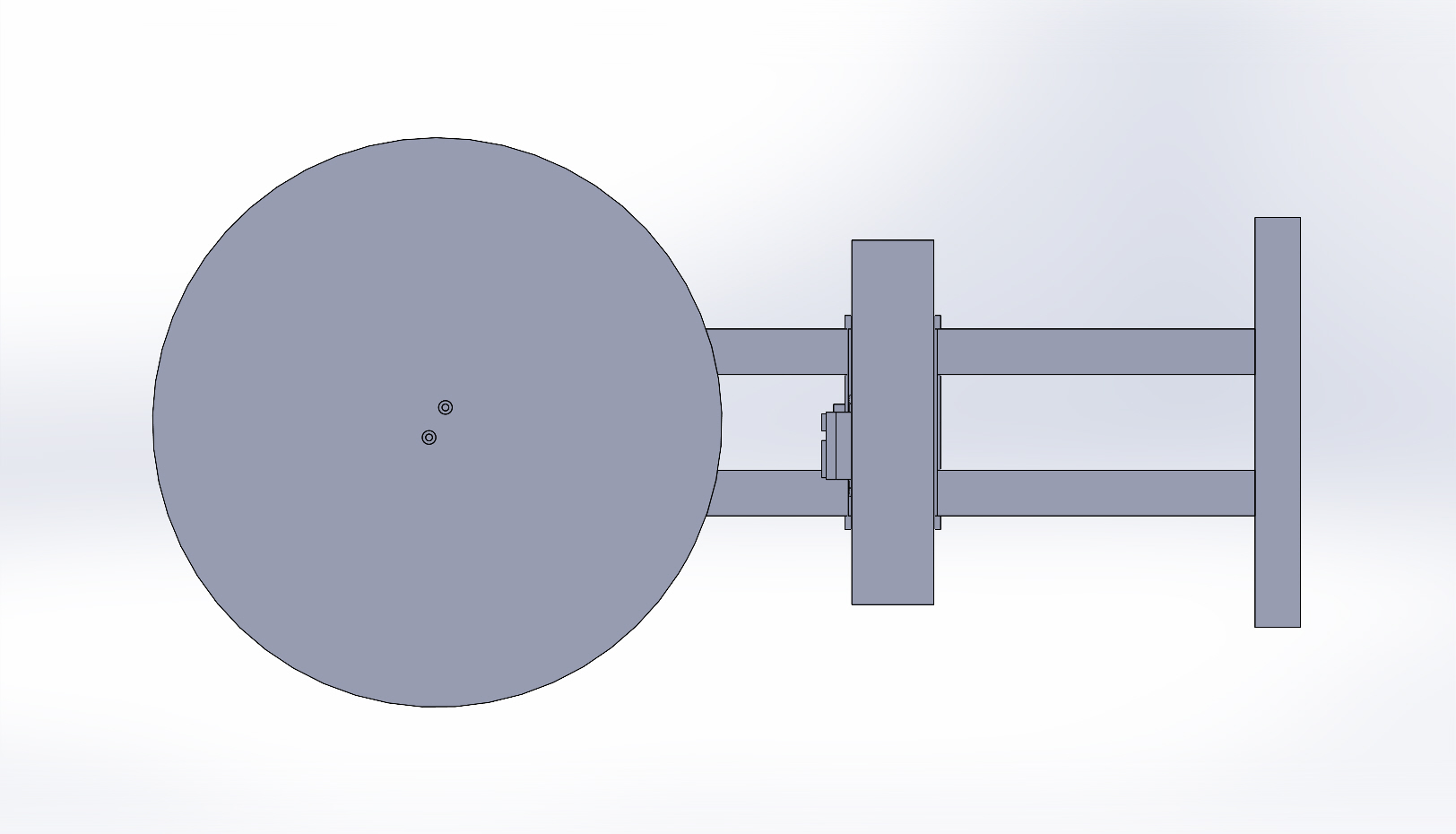
 3D scanner modeling front plan
3D scanner modeling front plan
2.2 3D 프린팅 & 레이저 커팅
3D 프린터와 레이저 커터는 서울대학교 해동 아이디어 팩토리에서 사용하였습니다.
 Laser cutting w/ VLS 6.60
Laser cutting w/ VLS 6.60
- 3D 프린터 출력 (신도리코 3D WOX DP200)
- IR 거리 센서 carriage
- 스크류, 연마봉 고정 장치
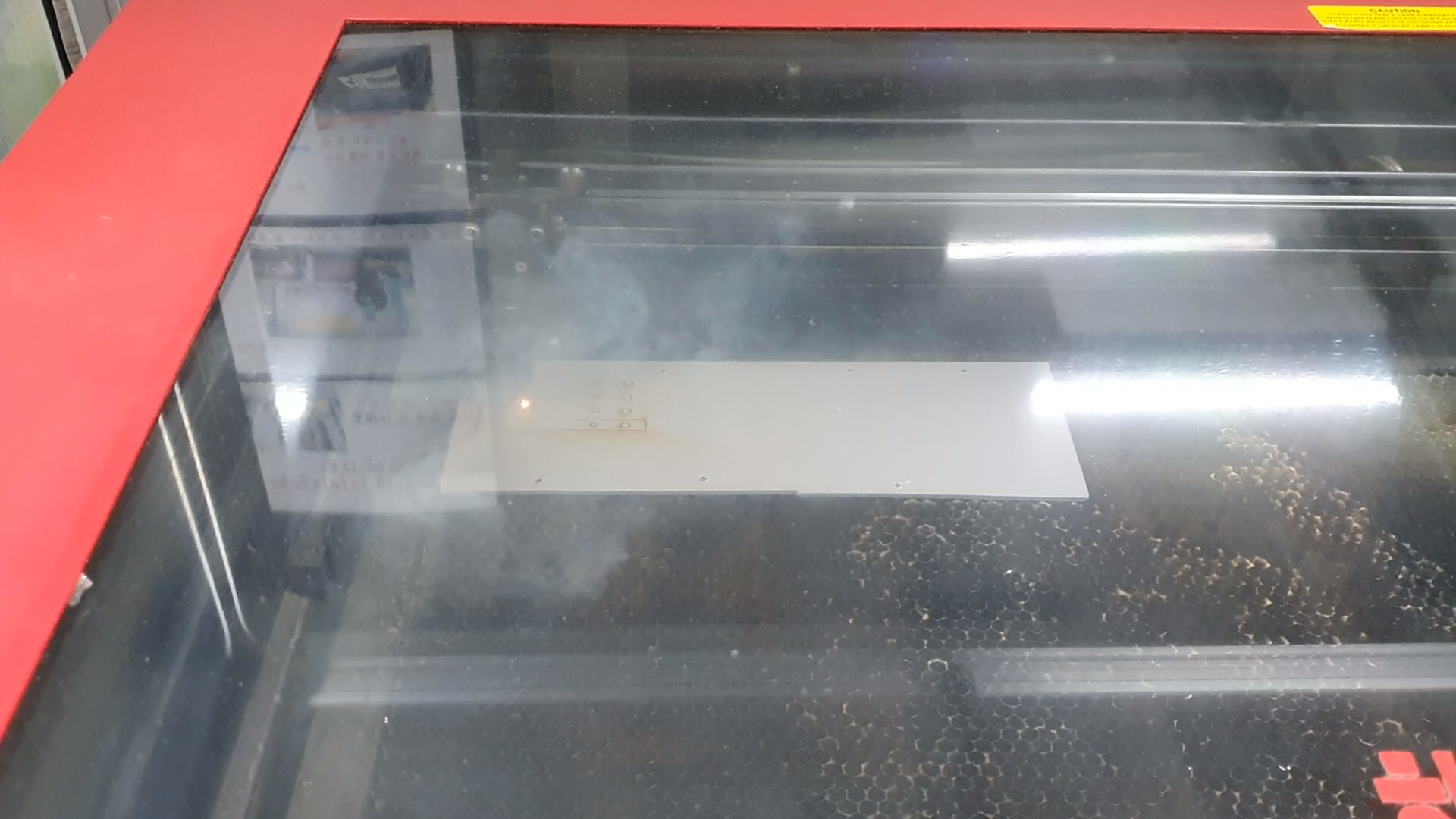
- 아크릴 레이저 커팅 (유니버셜 레이저 VLS 6.60)
- 스텝 모터-프로파일 고정 브라켓(3t)
- Rotating plate(5t)
2.3 하드웨어 조립
 3D scanner hardware assembly (LCK를 보며 :D)
3D scanner hardware assembly (LCK를 보며 :D)
- 그라인더를 사용하여 치수에 맞게 프로파일을 커팅하였습니다.
- 20mm 프로파일 스프링 너트에 고무발을 체결할 수 있도록 고정 볼트를 M5로 개조하였습니다.
- Rotating plate에서 볼트 머리를 숨기기 위해, 아크릴에 M4 카운터보어로 가공하였습니다.
2.4 하드웨어 완성
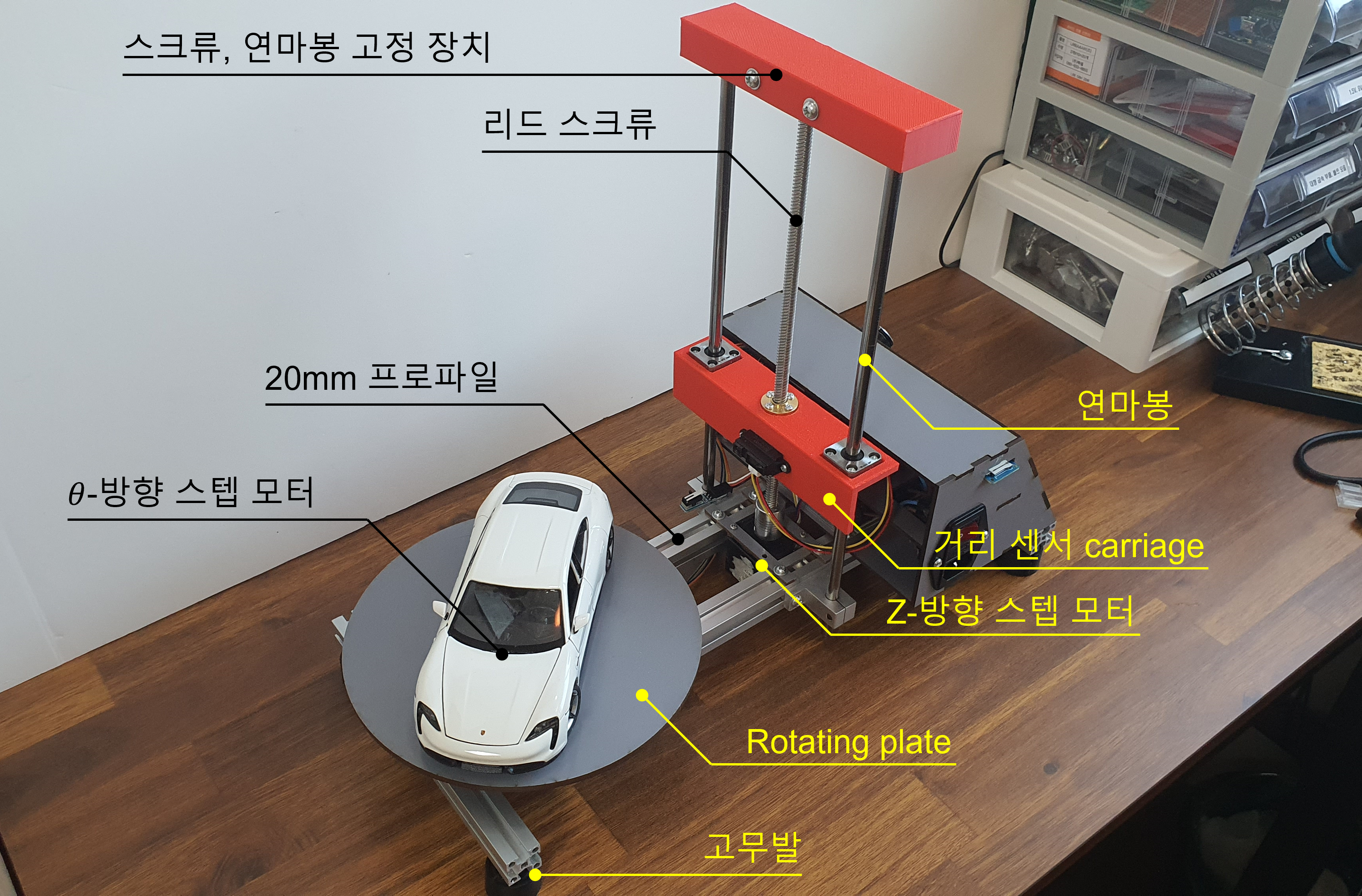 3D scanner hardware system
3D scanner hardware system
- 기본적으로는 20mm×20mm 프로파일을 골격으로 제작하였습니다. 2개의 가로 프로파일 사이에 z-방향 스텝 모터와 θ-방향 스텝 모터를 브라켓을 이용하여 고정하였습니다.
- θ-방향 스텝 모터에 세트 칼라를 사용하여 rotating plate를 연결하였습니다.
- z-방향 스텝 모터에는 커플러를 거쳐 리드 스크류와 연결됩니다. 리드 스크류와 리드 스크류 너트를 이용하여 z-방향 스텝 모터의 회전 운동을 거리 센서 carriage의 선형 운동으로 변환합니다.
- 거리 센서 carriage는 IR 거리 센서와 리드 스크류 너트, 리니어 볼부쉬가 설치되어 있습니다. 거리 센서 carriage가 흔들리지 않도록 2개의 연마봉이 프로파일과 클램프를 통해 고정되어있고, 리니어 볼부쉬가 각 연마봉을 통과하여 지나다니게 제작되었습니다. 연마봉과 리드 스크류는 고정 장치를 통해 상단에서 고정됩니다.
- 스텝 모터의 진동으로 인해 3D 스캐너 본체가 흔들리지 않도록 고무발을 장착하였습니다.