LeGO-LOAM은 ground를 이용하여 LOAM 알고리즘을 경량화하고 성능과 속도를 향상시켰다. LOAM과 비교하여 개선된 점을 위주로 논문을 정리해보았다.
Original paper
다음 자료를 참고하였습니다.
1. Introduction
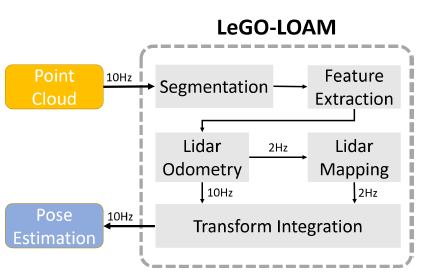
LOAM은 smoothness를 기준으로 edge, planar feature를 분류한 다음, 점들 사이의 scan-matching을 이용하여 두 scan 간의 대응 관계(correspondence)를 탐색한다. 실시간으로 알고리즘이 구동될 수 있게끔 추정 문제를 2개의 개별 알고리즘으로 나누어 해결한다. 하나(LiDAR Odometry)는 높은 주파수와 낮은 정확도로 센서의 속도를 추정하고, 다른 하나(LiDAR Mapping)는 낮은 주파수와 높은 정확도로 모션 추정을 수행한다. 이 두 추정값은 Transform Integration 단계에서 융합되어 높은 정확도와 낮은 drift를 보이게 된다.
본 논문은 UGV(Unmanned Ground Vehicle)에서 구동할 수 있는 LOAM을 제안하는데 목적을 두었다. LOAM은 모든 points에서 smoothness를 계산해야하므로 계산 리소스가 제한된 상황에 부적절하다. LiDAR가 지면에 가깝게 장착되는 UGV 특성 상 잔디 등의 요인으로 신뢰할 수 없는 edge feature가 추출될 수 있다. 이러한 요인으로 인해 부정확한 registration과 큰 drift가 발생할 우려가 있다.
이를 해결하고자 논문에서는 몇 가지 contribution points를 제안한다.
- Pointcloud segmentation을 거친 후 ground와 신뢰할 수 없는 points를 제거
- Pose estimation 단계에서 optimization을 2 단계로 수행하여 계산 복잡도를 감소
- Drift를 보정하기 위해 loop closure를 수행
2. Notation and System Block Diagram
 출처: 원 논문
출처: 원 논문
- Right subcription $t$ : time of Sweeps
- $P_t$ : time $t$에 얻어진 pointcloud, $P_t = \{p_1, p_2, \cdots, p_n\}$
- $r_i$ : i번째 점의 depth
- $\mathbb{F}_e^t, \mathbb{F}_p^t$ : time $t$에서 얻은 모든 sub-images에서의 edge, planar features 집합
3. Segmentation
3.1 Ground Removal
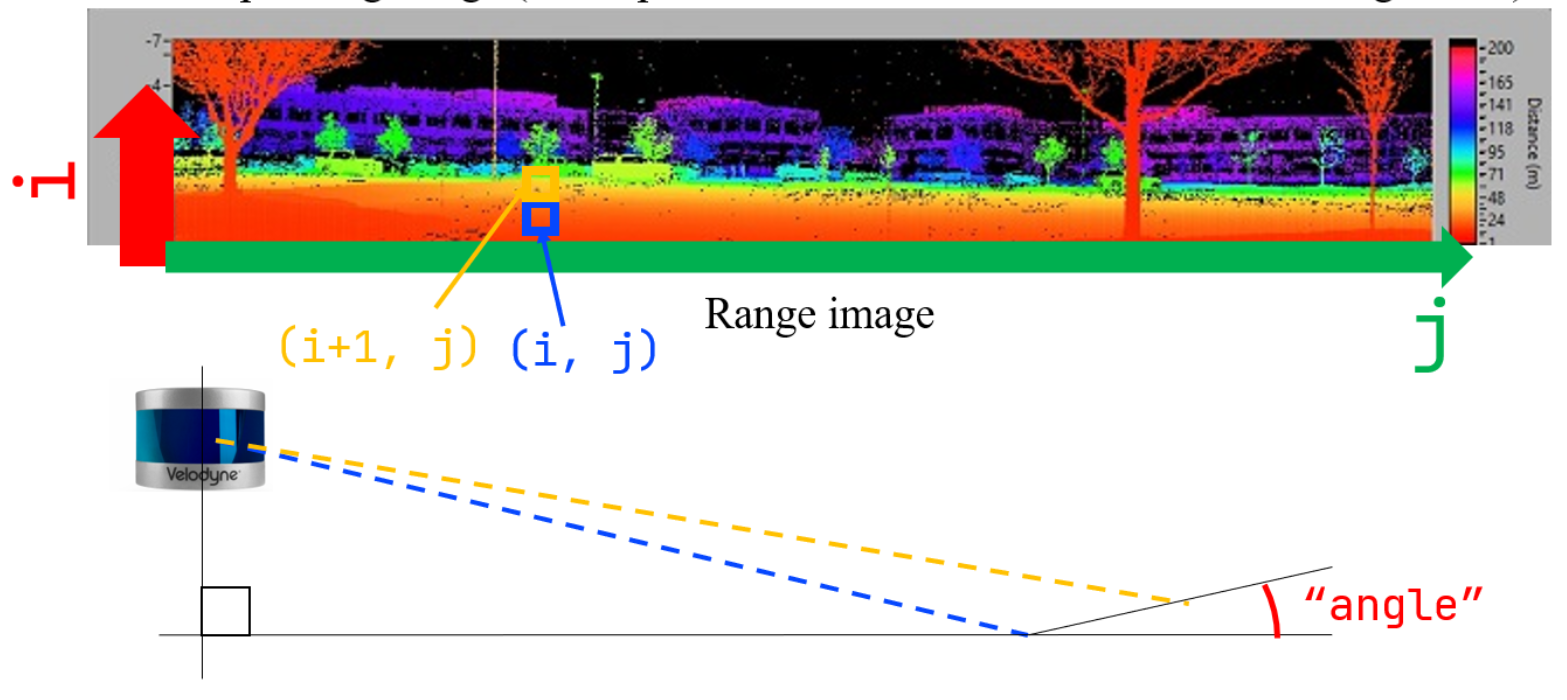
본 논문은 LiDAR가 지면과 평행하게 부착되어 있다고 가정한다. VLP-16을 예시로 들자면 한 각도에서 vectical한 방향으로 16개의 laser가 발사되어 거리가 측정된다. 이때 아래(ground) 방향으로 발사되는 8개 channel에 대해 Ground Removal 단계가 수행된다.
 출처: LeGO-LOAM Line by Line - 2. ImageProjection (2)
출처: LeGO-LOAM Line by Line - 2. ImageProjection (2)
Vectical하게 인접한 두 픽셀에 대해 LiDAR 좌표계에서의 $(x, y, z)$를 계산한다. 다음으로 그림과 같이 지면과 이루는 각도를
\[\theta = \arctan \frac{\Delta z}{\sqrt{\Delta x^2 + \Delta y^2}}\]로 계산한다. 그 각도가 10도보다 낮은 점을 ground로 판별한다.
[Note] Ground segmentation 성능
논문에서 제시하고 있는 방법은 효율적이지 않다고 하는데 그 원인은 다음과 같다.
- 한 픽셀 내에 여러 points가 찍히는 경우 실제 ground points가 ground가 판별되지 않음
- 기울기가 불규칙한 지역에서 성능이 상당히 저하됨
따라서 다른 용도로 ground segmentation을 적용할 필요가 있을 경우, 다른 알고리즘을 사용하는 것이 좋을 듯 하다.
3.2 Cloud Segmentation
지면을 분리한 pointclound에 image-based segmentation을 적용한다. 본 논문은 “Fast Range Image-Based Segmentation of Sparse 3D Laser Scans for Online Operation” 을 이용하여 segmentation을 수행하였다고 밝혔다.
Reference paper
 출처: “Fast Range Image-Based Segmentation of Sparse 3D Laser Scans for Online Operation”
출처: “Fast Range Image-Based Segmentation of Sparse 3D Laser Scans for Online Operation”
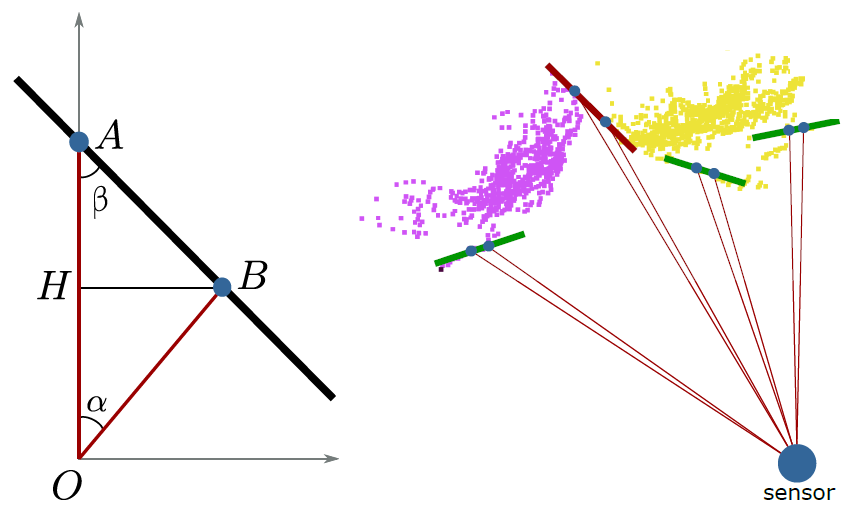
$\beta$를 laser 빔(line $OA$)과 인접한 두 픽셀을 이은 선(line $AB$)과의 각도로 정의한다. 이는 기하학적으로
\[\beta = \arctan \frac{d_2 \sin{\alpha}}{d_1 - d_2 \cos{\alpha}}\]로 계산 가능하다. 이때 $d_1, d_2$는 각각 점 A, B의 depth를 의미한다. $\beta$가 특정 threshold보다 작은 경우, 즉 오른쪽 그림에서 빨간색으로 표시한 경우, 경계면이 급격하게 변화하므로 두 점은 다른 물체에 포함되어 있다고 간주할 수 있다. 이러한 heuristic한 방법을 이용하여 BFS 기반으로 image segmentation & labeling을 수행할 수 있다.
수가 충분히 많지 않는(30개 이하) cluster는 robustness를 위해 유효한 점에서 제외한다.
4. LiDAR Odometry
 출처: 원 논문
출처: 원 논문
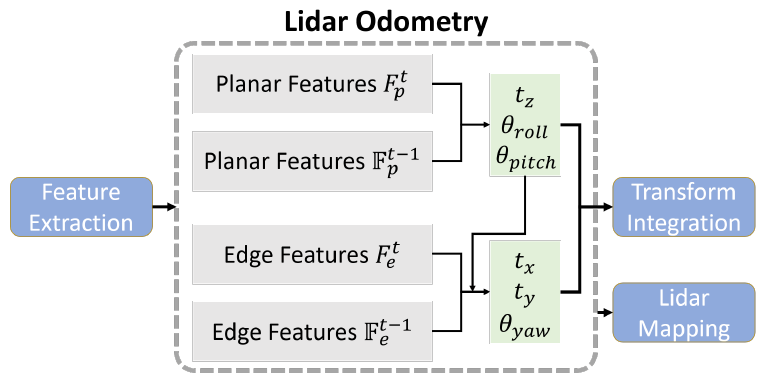
Feature Extraction 단계는 LOAM과 동일하여 생략한다. LiDAR Odometry 단계 역시 유사하지만, 몇 가지 차이점이 존재한다.
4.1 Label matching
Segmented cluster에서는 edge feature($\mathbb{F}_e$)의 correspondence만 탐색하고, ground cluster에서는 planar feature($\mathbb{F}_p$)의 correspondence만 탐색한다. 즉, feature extraction 단계에서 planar feature는 ground에서만, edge feature는 segmented cluster에서만 뽑으면 되므로, 계산 시간을 단축할 수 있다.
4.2 Two-step L-M optimization
Planar feature를 이용하여 $[t_z, {\theta} _ {roll}, {\theta} _ {pitch}]$를 optimize한 후 edge feature를 이용하여 $[t_x, t_y, {\theta} _ {yaw}]$를 optimize한다. 각각 과정에서 optimize하지 않는 parameter는 상수로 취급한다. 이를 통해 계산 시간을 35% 감소시키면서 유사한 정확도를 얻을 수 있다고 한다.
5. LiDAR Mapping
기본 아이디어는 LOAM과 동일하지만, pointcloud map을 저장할 때 feature set $\{ \mathbb{F} _ {e}, \mathbb{F} _ {p} \}$을 저장한다는 차이가 있다. $M_t = \{\{\mathbb{F} _ {e}^1, \mathbb{F} _ {p}^1\}, \cdots, \{\mathbb{F} _ {e}^t, \mathbb{F} _ {p}^t\}\}$라 정의할 때, $M_{t-1}$에서 $\bar{Q}_{t-1}$을 얻는 방법을 논문에서는 2 가지 제시하였다.
- 현재 pose를 기준으로 저장된 feature 중 주변 100m 이내에 있는 모든 pose들의 feature들을 불러온 다음, 모든 feature들을 각 pose로 transform하여 얻는다.
- LeGO-LOAM을 pose-graph SLAM으로 통합하여 생각한다. 즉, 로봇의 pose는 graph node로, feature set은 node의 measurement로 모델링한다.
그 후 LOAM과 마찬가지로 L-M optimization을 수행하여 transform matrix를 얻는다.
추가로 논문에서는 loop closure를 수행하여 추가적인 contraint를 얻으면 drift를 줄일 수 있을 것이라 한다.